Komponendid:
Arduino UNO plaat (1tk)
Arendusplaat (1tk)
Ultraheli kaugusandur (1tk),
Servo (1tk),
LED(red, green )
Juhtmed (19tk)
Tööprotsess:
kui tood käe anduri juurde, süttib roheline tuli ja servomootor pöörleb 90 kraadi; käe eemaldamisel süttib punane tuli ja servomootor pöörleb 0-ni
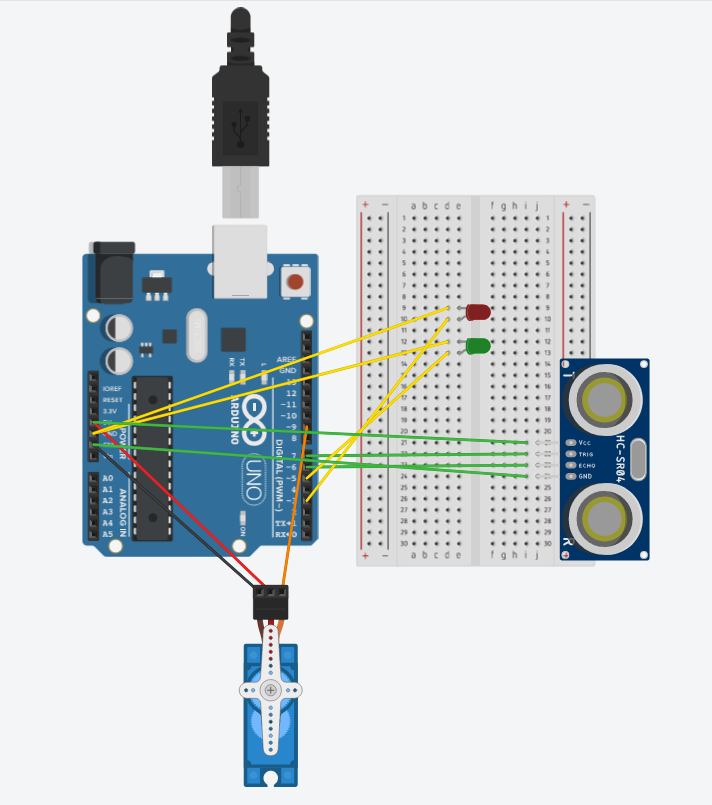
Skeem:
Programm:
include
Servo servoMotor;
int trigPin = 7;
int echoPin = 6;
int greenLedPin = 5;
int redLedPin = 3;
void setup() {
servoMotor.attach(9);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(greenLedPin, OUTPUT);
pinMode(redLedPin, OUTPUT);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration * 0.034 / 2;
if (distance >= 3 && distance <= 10) {
servoMotor.write(90);
digitalWrite(greenLedPin, HIGH);
digitalWrite(redLedPin, LOW);
} else {
servoMotor.write(0);
digitalWrite(greenLedPin, LOW);
digitalWrite(redLedPin, HIGH);
}
delay(100);
}
Video: